计算机视觉、人工智能将远程资产作为重点

对于工业物联网工程师而言,远程资产监视真是令人爱恨难断。一方面,它可以比传统维护程序提前几小时、几天甚至几周来告知现场设备的状况。它还可以确保在正确的时间,将正确的人员部署到正确的位置。
远程操作员可以在短时间内确定边界突破的原因或分析另一个模拟传感器报告的情况。借助正确的技术,他们甚至可以确定气体泄漏的源头、向大气中释放的气体的类型以及每秒释放多少立方米的气体。
但另一方面,这都会增加成本。
本地分析改变了一切
如果一张图片抵得过千言万语,看来一个视频流应该值 400 美元。这是为什么?因为这大约是单个监控摄像头每月蜂窝数据计划的成本。
这确实令人不安。产生这一成本的原因很多,但主要是因为这些现场通常需要多个摄像头,而只有一小部分视频才有价值。假设一个油田有 1,000 口井。网络连接的成本是巨大的。
幸运的是,可以使用更智能的方式来部署视频监控技术。例如,与其让安装在多摄像头现场的每个摄像头都通过自己的蜂窝连接传输视频,不如全部通过一台本地服务器路由?而且,由于不需要流式传输完整的视频文件,那为什么不利用流分析功能来识别应发送的特定剪辑呢?
这些是 Pixel Velocity 与其 Event Velocity 软件平台一起使用的创新。
Pixel Velocity 首席执行官 Jonathan Murray 说:“视频非常耗带宽,并且会引发各种问题。而且 99% 的视频毫无生气 — 什么也没发生。” Event Velocity 在边缘处理视频,并仅通过电信网络发送元数据以生成警报。
Murray 说:“这些警报只是视频片段。然后,操作员可以选择实时查看现场。而且我们可以将这些警报纳入整个现场每月 55 美元的数据计划中,因为蜂窝连接通过服务器托管多个摄像头。”
通过实时监控减少卡车使用量
Event Velocity 利用 OPC-UA 通信标准来集成来自多种类型的物联网传感器(包括音频、红外、SCADA 系统,当然还有视频)的数据。该技术结合了来自这些设备的数据,从而在发生不可预见事件时生成自动警报,并通过应用智能视频分析,最大程度地降低误报率并减少警报疲劳或不必要派车。
用户可以配置平台以查找特定变量或事件触发器,例如排除区域中的活动或某些区域中的温度波动。该监控解决方案还集成了光学气体成像软件,当与兼容的成像传感器配对时,可以检测 22 种不同的碳氢化合物。该成像软件可以分析羽状成分、大小和形状等变量,并在视频上叠加绿色、黄色和红色指示符,以帮助操作员更快地解释潜在的危险环境。
若有模拟传感器被触发,Event Velocity 便会指示摄像头对准相关资产,并分析最终的视频馈送以确定读数是否合法。该平台利用了分布式计算模型,因此可以在基于英特尔® 处理器的系统(如 Dell Edge Gateway)上执行此分析处理,该系统最多可以支持七个同步视频流。
如果情况良好,Event Velocity 便会在指定的时间段内将视频存储在这些本地边缘服务器上,并出于历史报告目的而仅发送定期元数据。但是,如果系统确定操作员可能对某事件感兴趣,便会将一小段视频剪辑发送到云。
在这里,集成的消息管理系统可确保通过移动消息、电子邮件或 Web 客户端将警报传达给相关人员。一旦操作员收到警报,他们就可以查看剪辑,并在必要时分析资产的实时视频回馈(图 1)。
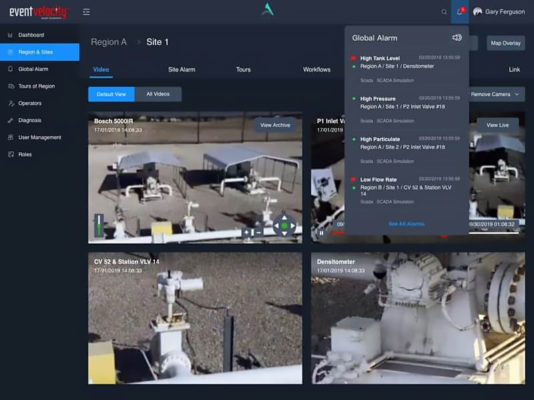
所有这些都是实时发生的,以尽可能低的成本为用户提供了尽可能高的可见性。而且,由于 Event Velocity 基于 OPC-UA 和其他开放式 API 构建,因此可以轻松地与现有控件或 SCADA 安装以及企业基础设施集成。
远程智能监控
通过高级视频监控,工业物联网操作员可以利用视频分析技术来自动过滤警报。此外,工程师可以使用相同的视频基础设施来放大远程资产的实时状态,并获得与现场情况几乎相同的见解。
既然工业物联网边缘计算和分析软件解决方案能够以经济的价格提供这些功能,那么不使用基于视频的资产监控实际上可能会浪费您的生产力、效率等。