失效安全协作机器人为工业物联网 (IIOT) 提供支持

1961年,通用汽车在其中一家工厂安装了第一台工业机器人 Unimate。它从本质上来说是一种机械臂,可以让工人摆脱从装配线捡拾压铸件并将这些零件焊接到车辆底盘上的危险任务。
实际上,像 Unimate 这样的传统静态机器人可谓非常强大,它相当于现代的固定机械臂,能够搬运大型重量的物体,执行重复的精确任务。
遗憾的是,大多数工业机器人展示的“能力”是有限的智能以及对其周围环境的不了解。由于这些机器人没有配备检测到人类和其他障碍物的传感器,也没有使它们能够在遇到障碍物时做出反应的控制系统,因此必须将它们隔离在狭窄的空间中,被赋予的功能也非常有限。对于当今看重效率、敏捷、灵活和移动性的数字化使用案例来说是一个缺点。这种用例不仅存在在互联工厂中,还在物流,智能零售和其他自动化应用中。
近 60 年后,协作机器人(cobot)实现了在开放环境中自主运行的能力,获得了与近距离工作的人类交互所需要的传感,智能和移动性。
今天,制造商正在寻求构建安全系统,从而使机器人和工人能够同时同地一起工作。
但在大规模部署这些颠覆性协作机器人之前,我们需要符合监管要求的新功能安全 (FuSa) 标准和技术。
智能工厂车间的安全
FuSa 涉及在各种情况下确保机器正确运行或以失效安全方式发生 故障的保证。这些场景包括有问题的输入信号(例如人为错误)、硬件故障、软件失灵,以及由环境和操作条件而导致的压力。要解决这些问题,协作机器人等机器人设备必须满足复杂的 FuSa 标准。
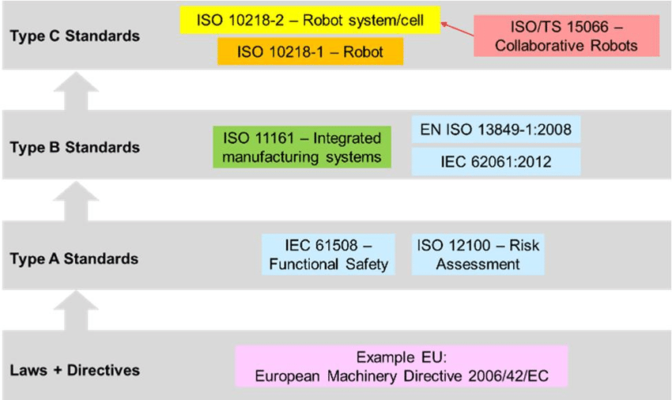
尽管协作机器人是最先进的技术,但一段时间以来,行业标准组织一直在研究新的 FuSa 技术规范,例如 ISO 10218-1/2 和 ISO 15066。这些技术规范基于现有标准的基础上,以定义机器系统设计的安全要求。这些组织定义的多种安全标准和要求(图 1)。
从头开始为系统的每个部分实施所有必需的标准是昂贵、费时且资源密集的。解决这些问题的一种方法是,使用已通过具有 FuSa 功能的组件设计的硬件和软件来实现机器人的控制安全相关系统。
这种技术可以在 NEXCOM International NexCOBOT SCB 100 安全控制主板 (SCB) 中找到,该主板基于英特尔凌动® x6000E 系列处理器。它为下一代自主机器人控制器提供了强大的安全功能。
自主协作机器人安全,就在眼前
英特尔凌动® x6427FE 和 x6200FE 处理器(以前被称为 Elkhart Lake)包含多个处理核心。这些处理器通过集成的英特尔® Safety Island 简化了符合 FuSa 的系统的设计。这是一套技术文档以及具有 FuSa Software 功能的组件可支持客户需求设计。
SCB100 机器人控制板提供了一个单一平台,可解决协作机器人系统中的功能安全问题。它已通过 IEC 61508 SIL2/SC3 认证,从硬件级别到堆栈都满足了新安全标准(如 ISO 10218-1/2 和 ISO 15066)的支持要求。在随附适当的安全实时操作系统(RTOS)时,SCB 100 允许开发人员或系统集成商添加他们自己的安全相关应用软件和硬件组件,以提供差异化,可快速投放市场的协作机器人设计。
该平台包括集成到机器人系统设计所需的所有接口和 I/O。其所有上述组件的内容使其成为机器人控制器系统的主要元素。这消除了对单独的离散安全控制器的需求,并降低了成本和复杂性。
协作机器人:未来就是现在
正如第四次工业革命的先驱 Nicky Verd 所说:“未来比你想象的要近。”的确如此。实际上,随着第五次工业革命的到来和协作机器人的当前发展,未来就是现在。
为了部署协作机器人并使其经常与他人在共享的工作空间中进行交互,必须为这些机器配备复杂的控制和安全处理平台。SCB 100 是一个可帮助通用汽车的 Unimate 加速过渡到 21 世纪协作机器人设计的平台。
声明:
并非所有 SKU 均包含每项特性。
并非每个操作系统都支持所有特性。
并非所有 SKU 都支持实时计算、时间敏感计算或时间同步网络。